Fast RTOS performance
embOS, a real-time operating system (RTOS), is designed for extremely fast performance, low RTOS latency and minimal jitter.
embOS is one of the fastest RTOS solutions available.
| Item | Value |
|---|---|
| Boot time | 85 cycles (213 nsec @400 MHz) |
| Context switching time | 192 Cycles (480 nsec @400 MHz). |
| Interrupt latency | Zero |
The task switching time, a key metric for real time embedded programming, has been measured with the parameters listed below:
| Item | Value |
|---|---|
| embOS Version | V5.14.0.0 |
| Application program | OS_MeasureCST_Scope.c |
| Hardware | Renesas RSKRZ/A1 |
| Program is executing in | RAM |
| CPU Mode | Thumb2 |
| Compiler used | SEGGER Embedded Studio V5.50d (SEGGER Compiler) |
| CPU frequency (fCPU) | 400.0 MHz |
| CPU clock cycle (tCycle): | tCycle = 1 / fCPU = 1 / 400.0 MHz = 2.5 nsec |
Measuring context switching in an RTOS
embOS is designed to perform fast context switches. This section describes two different methods to calculate the execution time of a context switch in the RTOS from a task with lower priority to a task with a higher priority.
The first method uses port pins and requires an oscilloscope. The second method uses our high-resolution measurement functions. Example programs for both methods are supplied in the Application directory of your embOS shipment.
SEGGER uses these programs to benchmark the embOS performance. You can use these examples to evaluate the benchmark results. Please note that the actual performance depends on many factors (CPU, clock speed, toolchain, memory model, optimization, configuration, etc.).
Port pins and oscilloscope
The context switching time is the time between switching the LED on and off. If the LED is switched on with an active high signal, the context switching time is the time between rising and falling edge of the signal. If the LED is switched on with an active low signal, the signal polarity is reversed. The RZ/A1 example below use active low LEDs.
The real RTOS context switching time is shorter, because the signal also contains the overhead of switching the LED on and off. The time of this overhead is also displayed on the oscilloscope as a small peak right before the task switching time display and has to be subtracted from the displayed context switching time. The picture on the right shows a simplified oscilloscope signal with an active-low LED signal (low means LED is illuminated). There are switching points to determine:
- A = LED is switched on for overhead measurement
- B = LED is switched off for overhead measurement
- C = LED is switched on right before context switch in low-prio task
- D = LED is switched off right after context switch in high-prio task
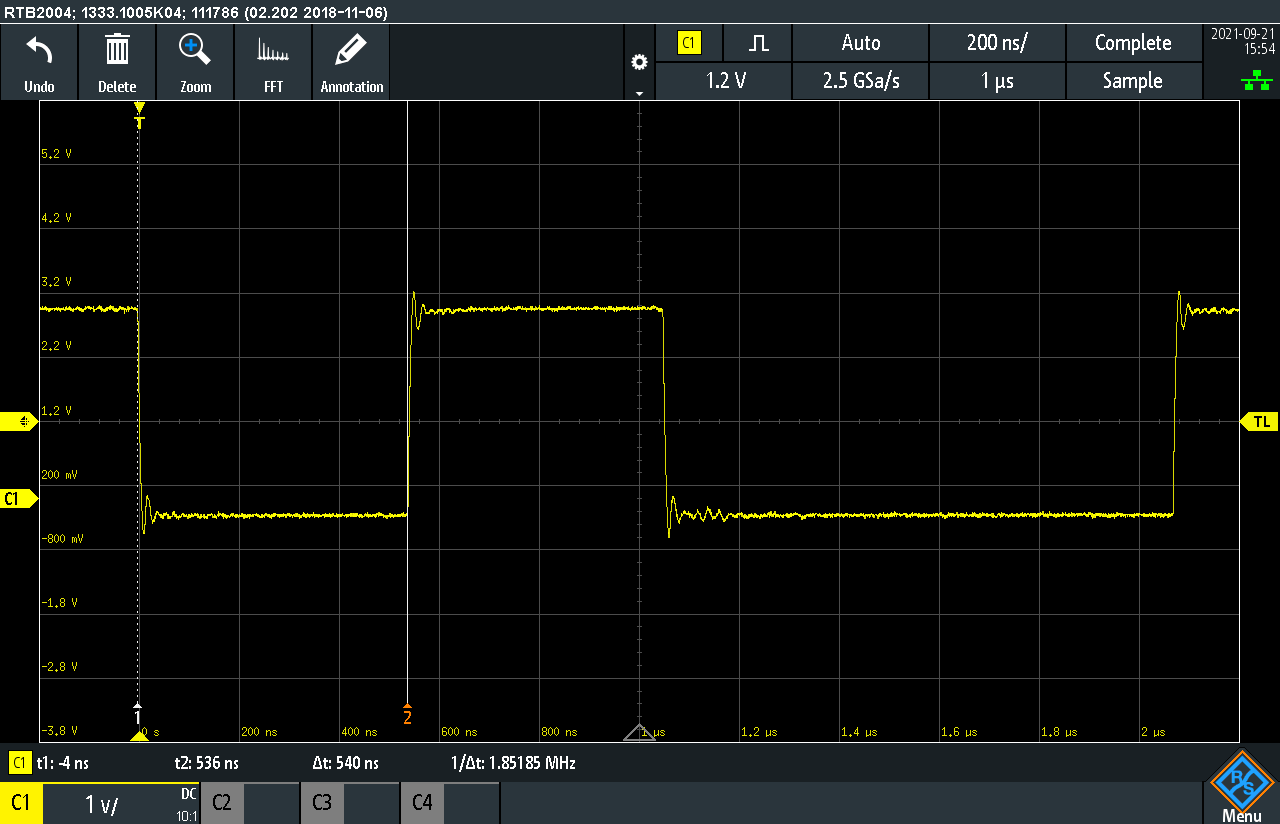
The time needed to switch the LED on and off in subroutines is marked as time tAB. The time needed for a complete context switch including the time needed to switch the LED on and off in subroutines is marked as time tCD. The RTOS latency (context switching time) tCS is calculated as follows: tCS = tCD - tAB
tAB is measured as 540 nsec.
The number of cycles calculates as follows:
CyclesAB = tAB / tCycle
= 540 nsec / 2.5 nsec
= 216 Cycles
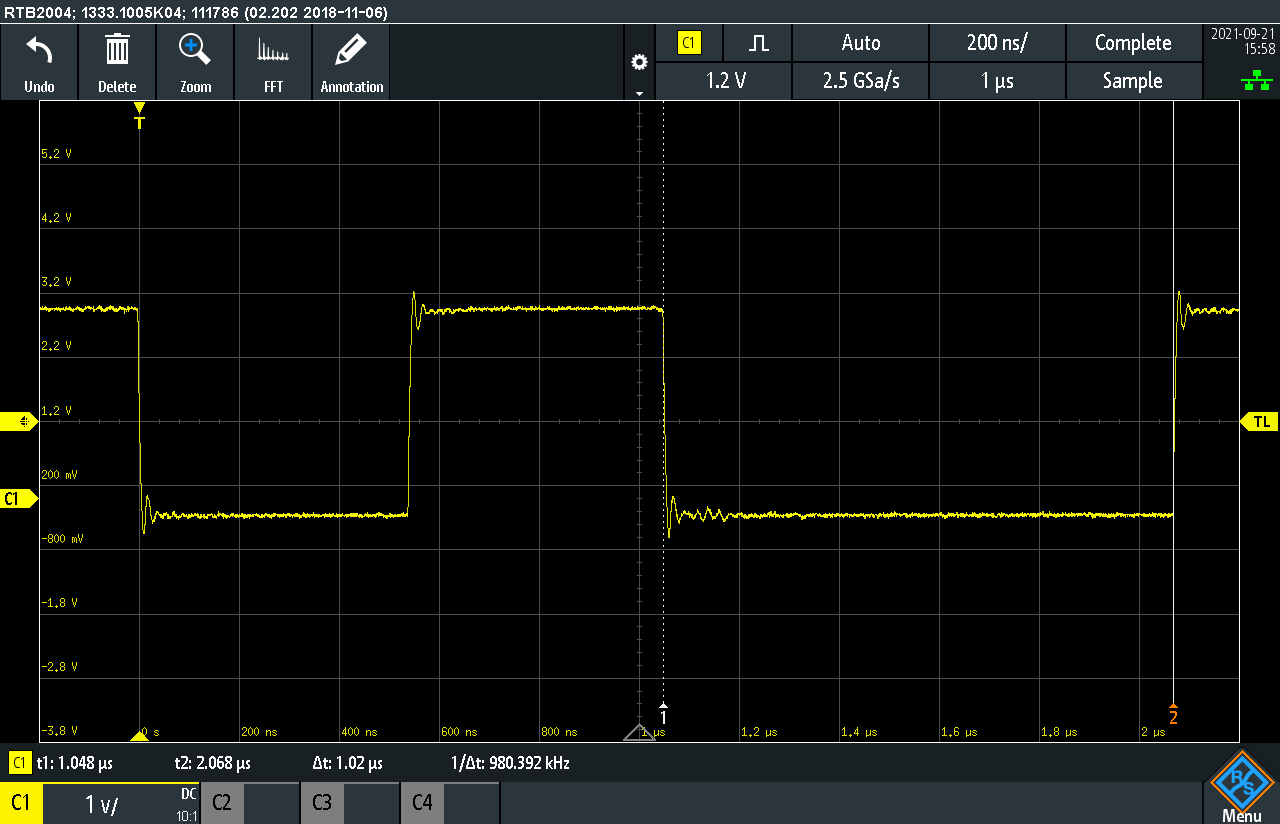
tCD is measured as 1020 nsec.
The number of cycles calculates as follows:
CyclesCD = tCD / tCycle
= 1020 nsec / 2.5 nsec
= 408 Cycles
Resulting context switching time (RTOS latency) and number of cycles
The time which is required for the pure context switch is:
tContextSwitch = CyclesCD - CyclesAB = 408 Cycles - 216 Cycles => 192 Cycles (0.48 usec @400 MHz).
Example application
#include "RTOS.h"
#include "BSP.h"
static OS_STACKPTR int StackHP[128], StackLP[128]; // Task stacks
static OS_TASK TCBHP, TCBLP; // Task-control-blocks
/*********************************************************************
*
* HPTask()
*/
static void HPTask(void) {
while (1) {
OS_TASK_Suspend(NULL); // Suspend high priority task
BSP_ClrLED(0); // Stop measurement
}
}
/*********************************************************************
*
* LPTask()
*/
static void LPTask(void) {
while (1) {
OS_TASK_Delay(100); // Synchronize to tick to avoid jitter
//
// Display measurement overhead
//
BSP_SetLED(0);
BSP_ClrLED(0);
//
// Perform measurement
//
BSP_SetLED(0); // Start measurement
OS_TASK_Resume(&TCBHP); // Resume high priority task to force task switch
}
}
/*********************************************************************
*
* main()
*/
int main(void) {
OS_Init(); // Initialize embOS
OS_InitHW(); // Initialize required hardware
BSP_Init(); // Initialize LED ports
OS_TASK_CREATE(&TCBHP, "HP Task", 100, HPTask, StackHP);
OS_TASK_CREATE(&TCBLP, "LP Task", 50, LPTask, StackLP);
OS_Start(); // Start embOS
return 0;
}High-resolution timer
The context switch time may also be measured with a high-resolution timer. The example OS_MeasureCST_HRTimer_embOSView.c uses a high-resolution timer to measure the context switch time from a low priority task to a high priority task and displays the results on embOSView.
The example program calculates and subtracts the measurement overhead itself, so there is no need to do this. The results will be transmitted to embOSView, so the example runs on every target that supports UART communication to embOSView. The example program OS_MeasureCST_HRTimer_Printf.c is equal to the example program OS_MeasureCST_HRTimer_embOSView.c but displays the results with the printf() function for those debuggers which support terminal output emulation.
#include "RTOS.h"
#include "stdio.h"
static OS_STACKPTR int StackHP[128], StackLP[128]; // Task stacks
static OS_TASK TCBHP, TCBLP; // Task-control-blocks
static OS_U32 _Time; // Timer values
/*********************************************************************
*
* HPTask()
*/
static void HPTask(void) {
while (1) {
OS_TASK_Suspend(NULL); // Suspend high priority task
OS_TIME_StopMeasurement(&Time); // Stop measurement
}
}
/*********************************************************************
*
* LPTask()
*/
static void LPTask(void) {
char acBuffer[100]; // Output buffer
OS_U32 MeasureOverhead; // Time for Measure Overhead
OS_U32 v; // Real context switching time
//
// Measure overhead for time measurement so we can take this into account by subtracting it
//
OS_TIME_StartMeasurement(&MeasureOverhead);
OS_TIME_StopMeasurement(&MeasureOverhead);
//
// Perform measurements in endless loop
//
while (1) {
OS_TASK_Delay(100); // Synchronize to tick to avoid jitter
OS_TIME_StartMeasurement(&Time); // Start measurement
OS_TASK_Resume(&TCBHP); // Resume high priority task to force task switch
v = OS_TIME_GetResult(&Time);
v -= OS_TIME_GetResult(&MeasureOverhead); // Calculate real context switching time (w/o measurement overhead)
v = OS_ConvertCycles2us(1000 * v); // Convert cycles to nano-seconds, increase time resolution
sprintf(acBuffer, "Context switch time: %lu. %.3lu usec\r", (v / 1000uL), (v % 1000uL)); // Create result text
OS_COM_SendString(acBuffer); // Print out result
}
}
/*********************************************************************
*
* main()
*/
int main(void) {
OS_Init(); // Initialize embOS
OS_InitHW(); // Initialize required hardware
OS_TASK_CREATE(&TCBHP, "HP Task", 100, HPTask, StackHP);
OS_TASK_CREATE(&TCBLP, "LP Task", 50, LPTask, StackLP);
OS_Start(); // Start embOS
return 0;
}