embOSView
Get insight into embOS
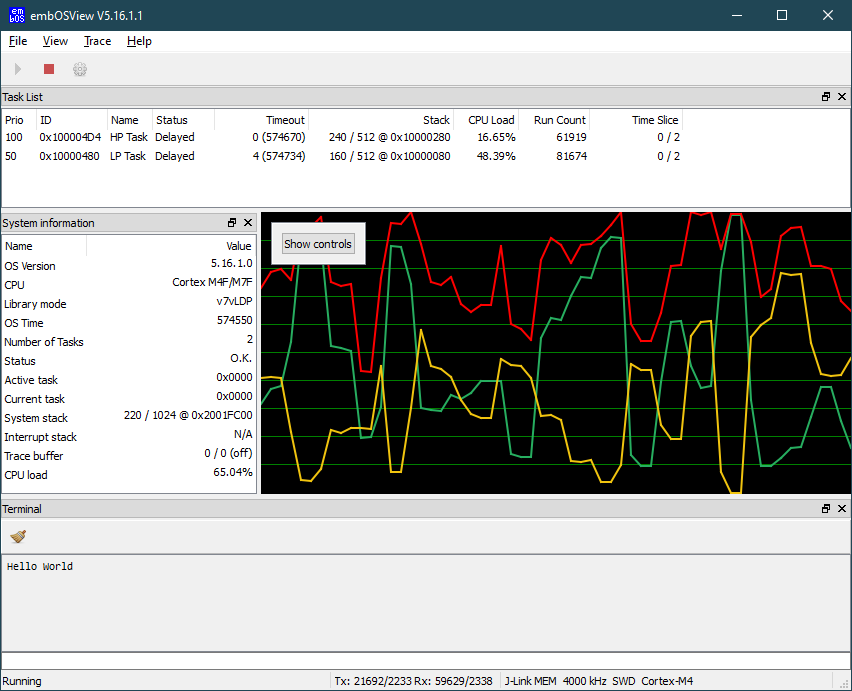
embOSView shows the state of every task created by the target application and the state of all major system variables at any given time.
Overview
The embOSView PC utility is a helpful tool for analyzing the running target application. It is shipped with embOS and runs on Windows, macOS and Linux.
embOSView gives perfect insight into embOS. It shows the state of every task created by the target application and the state of all major system variables. The CPU load graph shows the CPU utilization of every task. The terminal window supports easy communication with the target application. For instance, the application can use it to print debug messages.
embOSView is able to communicate with the target via different communication channels. These communication channels are Ethernet, serial interface (UART), and J-Link. J-Link communication is available for Arm Cortex-A/R/M cores and Renesas RX cores.
Multi-platform
Windows, macOS, Linux: With embOSView, there’s a similar look and feel on each platform. This enables efficient development on the chosen OS.
Each download of embOS contains the latest embOSView application. You may also download embOSView from the link below.